摘 要:車輛定位中利用多傳感器信息融合技術(shù)可以提高定位精度�。 系統(tǒng)中的傳感器數(shù)量急劇增加,傳統(tǒng)儀器很難滿足整個系統(tǒng)的測量需求��。 本文開發(fā)了一種基于虛擬儀器軟件開發(fā)環(huán)境LabVIEW的多傳感器信息采集平臺�,將多傳感器數(shù)據(jù)采集、預(yù)處理���、信息顯示�、存儲及數(shù)據(jù)回放集成在一起�����,解決了以往實現(xiàn)多傳感器信息同步十分困難的問題��,為將來進一步研究利用虛擬儀器測量多傳感器信息及進行多傳感器信息融合奠定了基礎(chǔ)��。
關(guān)鍵詞:LabVIEW��;數(shù)據(jù)采集���;全球定位系統(tǒng)���;慣性測量單元
引 言
車輛定位導(dǎo)航技術(shù)是智能交通系統(tǒng)( ITS)中一個重要技術(shù),而定位精度、定位數(shù)據(jù)的連續(xù)性和可靠性是導(dǎo)航系統(tǒng)性能的三個重要因素�。 車輛定位導(dǎo)航的精度直接取決于各個傳感器的精度,而傳感器精度的提高往往受技術(shù)���、價格等因素的影響��。 目前廣泛采用的基于多傳感器融合的組合導(dǎo)航系統(tǒng)���,能夠有效提高導(dǎo)航定位精度,增強導(dǎo)航系統(tǒng)的可靠性�,進而充分保證導(dǎo)航數(shù)據(jù)的連續(xù)性和可用性。 傳感器數(shù)量在系統(tǒng)中的需求增加����,傳統(tǒng)儀器不再適應(yīng)系統(tǒng)要求。本文作者利用NI公司的虛擬儀器編程軟件LabVIEW所設(shè)計的多傳感器信息采集平臺���,為組合導(dǎo)航中的多傳感器信息采集工作提供了一個通用的平臺,克服了傳統(tǒng)儀器功能單一����,靈活性差,更新和維護費用高的缺點�����。 并且將數(shù)據(jù)采集、預(yù)處理����、信息顯示、存儲和回放集成在一起�,形成統(tǒng)一格式的數(shù)據(jù)文件,方便與其它數(shù)據(jù)分析軟件的接口���,例如與Matlab的接口�。 在這個多傳感器信息采集平臺�����,各種傳感器信息可以顯示在同一界面上����,可以很方便地在其它傳感器的信息中添加GPS時間信息,解決了以往實現(xiàn)多傳感器信息同步困難的問題�。
軟件開發(fā)平臺LabVIEW及結(jié)構(gòu)
LabVIEW全稱是Laboratory Virtual InstrumentEngineering Workbench ,是目前十分流行的虛擬儀器的軟件開發(fā)平臺���,是美國國家儀器公司(National INStrument) 推出的一種基于圖形開發(fā)�、調(diào)試和運行程序的集成化環(huán)境,是目前國際上唯一的編譯型的圖形化編程語言�����。
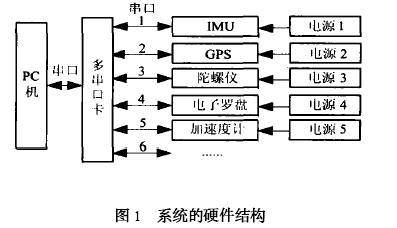
系統(tǒng)硬件結(jié)構(gòu)
實現(xiàn)此平臺的硬件結(jié)構(gòu)如圖1所示����。各種傳感器通過串行接口與計算機相連,實現(xiàn)與計算機的通信��,計算機利用系統(tǒng)的LabVIEW程序?qū)Ω鞣N傳感器發(fā)送控制命令����,多傳感器信息通過串口送入計算機,供LabVIEW程序進行數(shù)據(jù)的識別�����,讀取��,存儲以及后處理工作���。 各種傳感器信息分別通過各自接口與計算機通信之間是并行的。 由于實驗室條件有限��,多傳感器僅以IMU和GPS為例完成了系統(tǒng)的設(shè)計工作。
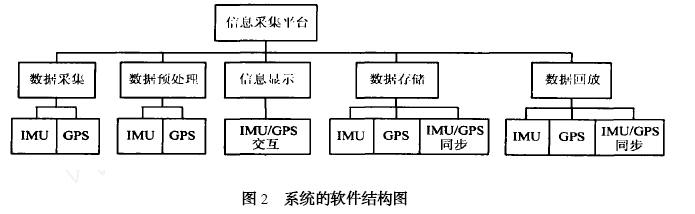
系統(tǒng)軟件結(jié)構(gòu)
系統(tǒng)的軟件結(jié)構(gòu)圖如圖2 所示��。 由圖2 可以看到��,整個系統(tǒng)完成了GPS/IMU的數(shù)據(jù)采集�����、數(shù)據(jù)預(yù)處理��、信息的同一界面顯示�����、數(shù)據(jù)存儲��、數(shù)據(jù)回放的功能�����。
系統(tǒng)關(guān)鍵技術(shù)及其功能實現(xiàn)
系統(tǒng)關(guān)鍵技術(shù)
(1) LabVIEW的并行機制
LabVIEW軟件應(yīng)用程序采用了并行程序結(jié)構(gòu)���,分別實現(xiàn)對多傳感器信息的測控����。 如在多任務(wù)并行處理中,兩個循環(huán)結(jié)構(gòu)構(gòu)成了兩個并行的任務(wù)�,每個任務(wù)體的執(zhí)行順序是互不相關(guān)的,甚至這兩個任務(wù)執(zhí)行的次數(shù)也是可以不一樣的�����。
(2) 串行口通信子VI
串行口通信的子VI針對計算機標(biāo)準(zhǔn)的串行口���。LabVIEW提供了一組(共5 個) 串行口通信子VI控件來承擔(dān)對編程的支持��,它們依次是:①串口初始化(Serial PorTInit) ��; ②串口讀(Serial PortRead) ���; ③串口寫(Serial PortWrite) ; ④串口字節(jié)數(shù)(ByteSatSerialPort) ��; ⑤串口中斷(Serial PortBreak) ����。
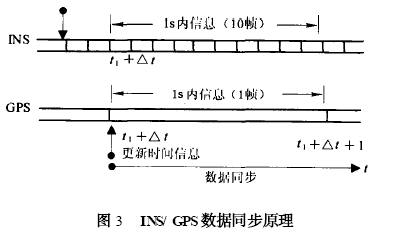
(3) 數(shù)據(jù)同步機制原理
多傳感器信息融合中,要使誤差最小�����,兩個傳感器數(shù)據(jù)的時間應(yīng)該相匹配����。 然而在實際的傳送到車輛中的基本定位信息只需要有限的時間信息,只要為傳感器信息確定數(shù)據(jù)起始時間���,然后可以根據(jù)傳送的數(shù)據(jù)量以及通信波特率來確定時間�����。 以GPS信息與慣性導(dǎo)航系統(tǒng)( Inertial NavigATION System�,INS) 的組合為例��,由于INS與GPS的采樣率不同��,INS采樣率一般為10 Hz �,而GPS的采樣率為1Hz。 如圖3 所示����,設(shè)t1時刻為IMU/INS及GPS信息開始可用時刻,首先從t1開始向緩存器中存儲一系列的IMU/INS信息�����,由于GPS采樣率較低,此時的GPS信息可能并不是t1時刻而是前一秒內(nèi)的信息�。 假設(shè)GPS信息在t1+Δt時刻更新,當(dāng)接收到GPS的t1+Δt時間信息后�,將緩存器的信息恢復(fù)到正確的時間并完成更新,取t1+Δt為兩個傳感器的數(shù)據(jù)起始時間���,這樣IMU/INS信息和GPS信息就達到了時間上的匹配���,此后的時間信息就可以通過傳送的數(shù)據(jù)量以及通信波特率來確定。
系統(tǒng)功能實現(xiàn)
(1) 數(shù)據(jù)的采集和預(yù)處理
此部分將傳感器原始數(shù)據(jù)從串口連續(xù)正確地讀進來之后�����,對數(shù)據(jù)進行預(yù)處理�,通過格式的轉(zhuǎn)換,數(shù)學(xué)計算等將原始數(shù)據(jù)轉(zhuǎn)換為傳感器實際測量信息���,并實現(xiàn)了IMU轉(zhuǎn)動角度的實時測量功能�����。 其基本原理就是將角速度進行時間積分���,得到角度的變化值��。 由于陀螺儀在不同的溫度下有著不同程度的零點漂移���,在積分的情況下其誤差就會不斷累加�,所以在此模塊中特別增加了一個實時計算陀螺儀各軸方向靜止?fàn)顟B(tài)時平均漂移的子VI,用來對角速度積分的誤差進行補償���,從而得到比較準(zhǔn)確的角度變化值�。下面以IMU為例�,說明原始數(shù)據(jù)到實際測量值轉(zhuǎn)換的實現(xiàn)過程。每個IMU信息包含18個字節(jié)信息���,其定義如表1所示���。
表1 IMU18字節(jié)定位信息
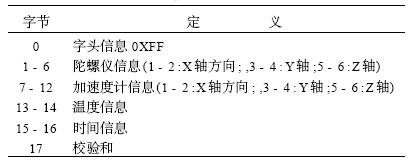
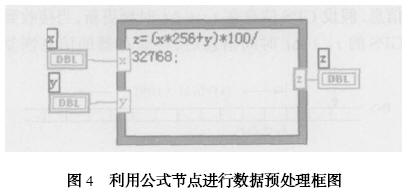
圖4 為利用公式節(jié)點進行數(shù)據(jù)預(yù)處理框圖。 其中x 和y 是輸入的原始數(shù)據(jù)�����,z 為輸出的實際測量值����。 程序?qū)?8字節(jié)的字符串?dāng)?shù)據(jù)轉(zhuǎn)換為數(shù)字數(shù)組后�,在框圖上可直接在公式節(jié)點中輸入公式�,完成原始信息到實際測量值的轉(zhuǎn)換。
(2) 信息顯示
軟件采用友好和直觀的界面呈現(xiàn)來自傳感器的信息�,分別對來自GPS和IMU的數(shù)據(jù)信息進行呈現(xiàn)。 其部分界面如圖5��、圖6所示�����。
我們在設(shè)計過程中�����,特別采用了Tab控件�����,可以將IMU和GPS信息同時顯示在同一面板的不同分頁上����,使我們能夠很方便地交互地察看兩個傳感器的信息。
圖5 IMU信息顯示界面
圖6 GPS信息顯示界面
(3) 數(shù)據(jù)存儲
在LabVIEW軟件平臺下��,可以采用3種格式存儲數(shù)據(jù):文本文件,二進制文件和數(shù)據(jù)記錄文件�����。數(shù)據(jù)存儲的功能由一個寫文件子VI和一個Case結(jié)構(gòu)構(gòu)成�����。 點擊前面板上的存儲控制按鈕時�,系統(tǒng)就會將IMU或者GPS數(shù)據(jù)進行存儲����,并且可以隨時終止存儲工作。 由于IMU信息中沒有實際時間信息����,為了實現(xiàn)多傳感器信息的同步,以及存儲文件的后處理需要�,特在IMU存儲信息中添加了同步的GPS時間信息。 為了方便用其它的程序來讀取數(shù)據(jù)進行后處理工作���,本文采用的是文本文件的
存儲格式����。
(4) 數(shù)據(jù)回放
進行數(shù)據(jù)的回放工作,首先要將文件按照其存儲格式識別出來���,然后再將信息顯示在界面上���。 由于LabVIEW對文件進行讀取的函數(shù)不是很多,而且一般對文件格式的要求比較嚴格���,所以�,我們采取了一種方法�,就是先將文件中所有的字符串讀出來,然后再利用LabVIEW中豐富的字符串操作函數(shù)��,對所讀取的字符串進行分離�,識別和處理。對GPS信息進行讀取�����、處理����、顯示、存儲��,以及回放的程序,與IMU相似���,只是在數(shù)據(jù)格式方面有些不同���,本文不再贅述。
結(jié) 語
利用LabVIEW及現(xiàn)有的實驗室設(shè)備建立了多傳感器信息采集平臺����,本平臺通用性能好,免除了對多傳感器信息采集的操作過程中一些煩瑣的工作�,采集過程不再需要編寫不同的軟件以適應(yīng)不同傳感器要求;將多傳感器信息在同一界面上顯示�����,使測量信息更加直觀��;形成了統(tǒng)一格式的數(shù)據(jù)存儲文件����,有利于多傳感器存儲信息的后處理��。 本平臺充分利用了虛擬儀器的靈活性和多輸入多輸出的特點����,將計算機����、多傳感器�����、LabVIEW軟件結(jié)合起來�,構(gòu)成了一個虛擬儀器系統(tǒng),實現(xiàn)對多傳感器信息的測控�,為將來進一步研究利用虛擬儀器測控多傳感器信息以及進行多傳感器信息融合奠定了基礎(chǔ)。
來源:賽斯維傳感器網(wǎng)
訂貨電話:13402168531(微信同),021-60512919
業(yè)務(wù)QQ: 2229069859
阿里旺旺: seaine168
淘寶企業(yè)店鋪: https://shop512779345.taobao.com
公司官網(wǎng):http://www.greewire.com
現(xiàn)貨特價產(chǎn)品:
Brand Product Product name
CAPTRON 100189
CAA-550-H18G4T-PS6/CP174
CAPTRON 100225 CAA-180-H18G4T-PO6/CP174
CAPTRON 100252 ISM-2000/24VDC
CAPTRON 100271 OGR-10T-PU6
CAPTRON 100274 OGR-50T-PU6
CAPTRON 100275 OGR-80T-PU6
CAPTRON 100276 OGR-120T-PU6
CAPTRON 100277 OGR-20T-PU6
CAPTRON 100293 i20B-F56M-PS6
CAPTRON 100313 CHT1-559PRS-30
CAPTRON 100314 CHT1-1K9D-30
CAPTRON 100315 CHT12-T58P-205
CAPTRON 100318 CHT1-1K9B-30
CAPTRON 100319 CHT1-158D-19
CAPTRON 100321 CHT1-19XPRSS-H
CAPTRON 100325 CHT1-158B-30
CAPTRON 100329 CHT1-17XB-H
CAPTRON 100330 CHT1-17XB-10
CAPTRON 100331 CHT1-15XB-H
CAPTRON 100334 CHT1-55GP-30
CAPTRON 100335 CHT1-559P-29
CAPTRON 100336 CHT1-55GP-29
CAPTRON 100344 CHT1-559P-H
CAPTRON 100346 CHT1-198BRSO-30
CAPTRON 100349 CHT1-178P-H
CAPTRON 100350 CHT1-579P-H
CAPTRON 100364 CHT1-158B-371
CAPTRON 100368 CHT1-158B-368
CAPTRON 100401 CHT3-07XP-H/TG-SR/ST
CAPTRON 100418 CHT3-A71U-38/TG-SR/CP29
CAPTRON 100421 CHT32-170B-40/TG-SR
CAPTRON 100423 CHT3-476P-29/TG-SR
CAPTRON 100426 CHT3-185B-41/TG-YW
CAPTRON 100427 CHT3-456PV-H/TG-SR/ST
CAPTRON 100428 CHT3-15HB-30/TG-SR/ST
CAPTRON 100537 CTL1-158-30/RYG
CAPTRON 100582 CAA-60-H18G4T-PS6/CP174
主營產(chǎn)品類型:Sick傳感器,Sick激光掃描儀,Sick安全光柵,sick激光掃描儀,編碼器,安全光柵,安全繼電器,CAPTRON觸摸開關(guān)
主營產(chǎn)品品牌:
德國CAPTRON
,德國SICK
,威格勒Wenglor
,美國BANNER
,意大利DATALOGIC
,日本SMC
,德國IFM
,德國P+F
,費斯托FESTO
,施耐德Schneider Electric
,西門子SIEMENS
,歐姆龍OMRON
,圖爾克Turck
,諾冠NORGREN
訂貨電話:13402168531(微信)
業(yè)務(wù)QQ: 2229069859
阿里旺旺: seaine168
淘寶企業(yè)店鋪: https://shop512779345.taobao.com
公司官網(wǎng):http://www.greewire.com
進入上海遠康自動化淘寶店鋪